sound test program

For the "sound test" our robot would play a set of 14 tones, starting at 440 decibles and working its way up 1000 decibles per tone. Our hypothesis was that older subjects would have more difficulty hearing due to more exposure.
Sound test results
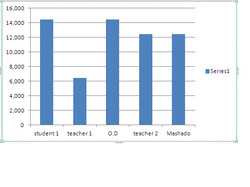
Our results backed up our hypothesis. The older subjects (age was never revealed only assumed) seemed to loose the tone earlier than younger students.
engineering design
For this assignment we had to set up our robot to have a sensor that would measure the decibles of tools in a shop class. Then research what noise level can damage hearing.
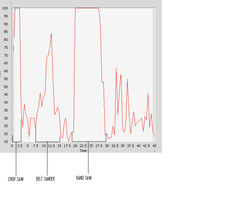
We tested three power tools and concluded the table saw was the highest with readings off the charts.
further research concluded anything over 85 decibles can cause hearing loss over time and length of exposure. Maybe we should take more precautions before using these devices. Oh well wear and tears how I roll anyway.
We tested three power tools and concluded the table saw was the highest with readings off the charts.
further research concluded anything over 85 decibles can cause hearing loss over time and length of exposure. Maybe we should take more precautions before using these devices. Oh well wear and tears how I roll anyway.
thunder bot
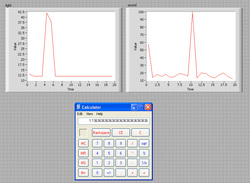
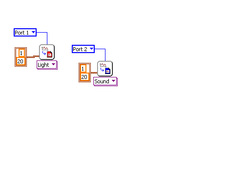
For this assignment we simulated a thunder storm in the classroom by flicking the lights and dropping a wood plank on the ground. Then we had to design a robot using a light sensor, and a sound sensor that can pick up the time between the "thunder and lightning". Then we took those times and used a formula to assume how far away the "strike" was.
After our robots collected the data, we plugged the times in a formula and we figured out how far away the strike actually was.
After our robots collected the data, we plugged the times in a formula and we figured out how far away the strike actually was.
thunder program
lick here to edit.
Reaction program

We lost our data, howeverIfoundourprogram in robolab. domly flash at some point between ten seconds, then we had the pull a trigger to turn it off. The robot would measure our reaction time. We thought gender would be a factor, however we asked some stuents about how much tv they watch and some students who whatched tv alot had a slower reaction. this wasnt always the case however but for the most part this seemed true. (the robot would ran) <--- thats whats missing in the beggining
Light test program
light results
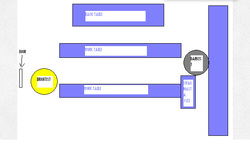
in this test, we assembled our robot, with a light reading sensor pointede up and put together a program that measured the amount of light by time. After completing this robot we walked a peramater of the room and measured the darkest and lightest areas. We assumed that the areas under light would peak at the same readings. In this picture, we created a map of the classrooom and drew points to mark our results.
THREE DOT BOT

In this assignment we assembled a robot and programed it to travel from three points located in the back of the room. we were assigned a random pattern, and through trial and error we werre to get the robot from point to point and wait a certain length of time at certain areas. this assignment was one of the first for the term, it didnt take too loong to finish, but it took a while to make it to weebly.
. State the assignment (problem/project) in your own words.
In this assignment we assembled a robot and programed it to travel from three points located in the back of the room. we were assigned a random pattern, and through trial and error we werre to get the robot from point to point and wait a certain length of time at certain areas.
What are your input factors? (What do you need to know or do before you can begin?) Include the research you did.
We had to figure out how long our motors had too run in order to make it to the dots, we also had to figure out how to make it turn precisely to angle it at the next dot.
5. Describe feedback you received during the project (suggestions, comments, etc). From peers, instructor ect.. How did you use this feedback to correct issues with your project?
We watched joe and kelsey, their robots were missing the mark and they were doing good honing in on there target. they told us what factors in that long program are the easiest to modify to tweak the direction of the robot.
. State the assignment (problem/project) in your own words.
In this assignment we assembled a robot and programed it to travel from three points located in the back of the room. we were assigned a random pattern, and through trial and error we werre to get the robot from point to point and wait a certain length of time at certain areas.
What are your input factors? (What do you need to know or do before you can begin?) Include the research you did.
We had to figure out how long our motors had too run in order to make it to the dots, we also had to figure out how to make it turn precisely to angle it at the next dot.
5. Describe feedback you received during the project (suggestions, comments, etc). From peers, instructor ect.. How did you use this feedback to correct issues with your project?
We watched joe and kelsey, their robots were missing the mark and they were doing good honing in on there target. they told us what factors in that long program are the easiest to modify to tweak the direction of the robot.
