continued

. State the assignment (problem/project) in your own words.
In this assignment we assembled a robot and programed it to travel from three points located in the back of the room. we were assigned a random pattern, and through trial and error we werre to get the robot from point to point and wait a certain length of time at certain areas.
What are your input factors? (What do you need to know or do before you can begin?) Include the research you did.
We had to figure out how long our motors had too run in order to make it to the dots, we also had to figure out how to make it turn precisely to angle it at the next dot.
5. Describe feedback you received during the project (suggestions, comments, etc). From peers, instructor ect.. How did you use this feedback to correct issues with your project?
We watched joe and kelsey, their robots were missing the mark and they were doing good honing in on there target. they told us what factors in that long program are the easiest to modify to tweak the direction of the robot.
6. What did you learn in this assignment.
We learned a clever way to dull down our motors in order to cruise to the next point.
7 we would used a wheel instead of skiis.
Final
Steps of the engineering design process
formulate a problem
deside what needs to be improved
brainstorm
come up with plans
select your final plan
prototype
feedback
fix
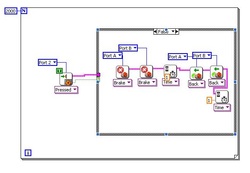
1. The robot drivves foreward 2 seconds, breaks, then I guess it turns and continues driving foreward for the alotted time.
2.
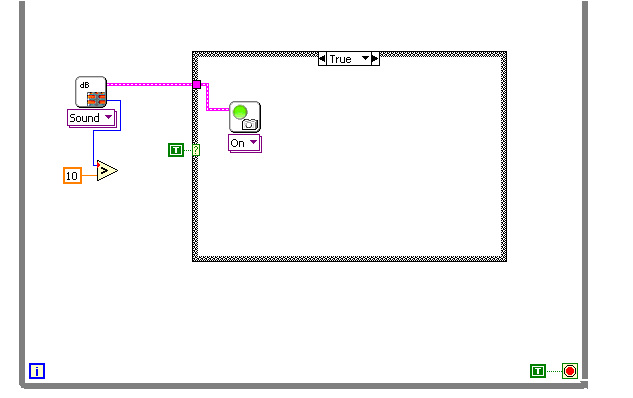
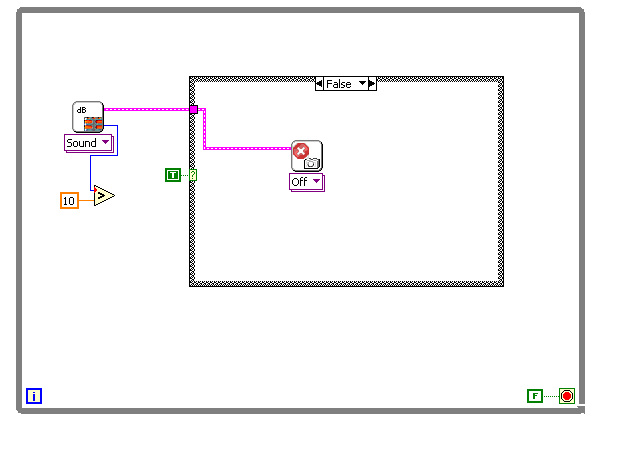
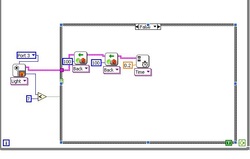
3. When the ambient light is less than 55, the "true" program runs, and the robot drives foreward. If it is greater than 55, the "False" function kicks in, where the robot reverses for the alotted time.
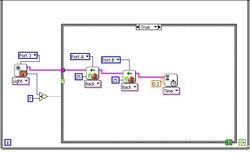
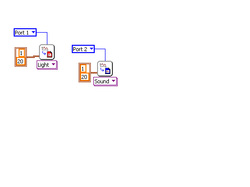
4.The robot will play a series of tones, starting at a frequency of 123. Every time you hit the touch sensor the frequency increases by 1000.
Steps of the engineering design process
formulate a problem
deside what needs to be improved
brainstorm
come up with plans
select your final plan
prototype
feedback
fix
1. The robot drivves foreward 2 seconds, breaks, then I guess it turns and continues driving foreward for the alotted time.
2.
3. When the ambient light is less than 55, the "true" program runs, and the robot drives foreward. If it is greater than 55, the "False" function kicks in, where the robot reverses for the alotted time.
4.The robot will play a series of tones, starting at a frequency of 123. Every time you hit the touch sensor the frequency increases by 1000.
TABLE BOT
TRUE/ FALSE COCKROACH
THUNDERSTORM
phone sensor